Using Swarm AI to Map a Cave Network
–
Cave exploration poses a unique set of challenges - it's both dangerous and time-consuming. This project showcases the potential of swarm AI through a fleet of autonomous flying drones, navigating and exploring caves with improved efficiency. In addition, the simulation utilises a cave environment generation system to ensure each simulation unfolds in a realistic and captivating landscape.
C++
GLUT
Multiple drone cave exploration
Project Highlights
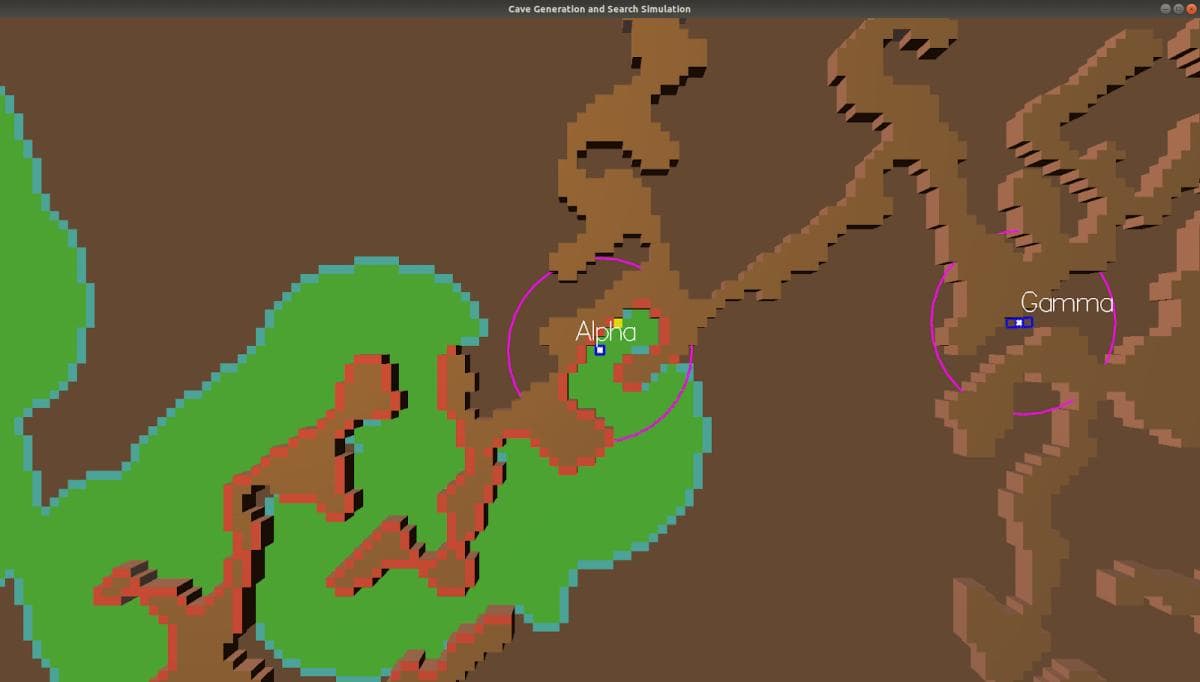
- Realistic Cave Environments: Starting from Simplex noise, then employing cellular automata and several flood fills to craft unique, realistic cave environments that serve as the backdrop for exploration.
- Individual Drone Search: Observe a single drone efficiently navigating and exploring every nook and cranny within the cave, employing a semi-efficient approach that ensures no stone goes unturned.
- Collaborative Drone Search: Harness the synergy of multiple drones working in unison. These autonomous explorers share information, avoid redundant exploration, and collaborate seamlessly to efficiently map the cave.
- Immersive Visualisation:Visualise the drone's journey as they uncover new territory, see explored cells, identify potential frontier areas, and pinpoint their next target location.
- Detailed Statistics: Review in-depth statistics for each drone, including the distance travelled and the percentage of the cave each has successfully explored, providing valuable insights into their efficiency and effectiveness.